コンクリート表面のひび割れを「見逃さない」AI ― E3 ENGINE®の異常検知性能を実データで検証
橋梁やトンネル、建物の壁面に走る微細なひび割れ。インフラや構造物の点検では、こうした「疵(きず)」をいかに見落とさず、しかも過検出せずに捉えられるかが品質と安全を左右します。本記事では、TOMOMI RESEARCHのAI異常検知ソフトウェア E3 ENGINE® を、コンクリート表面のひび割れ画像24,000枚で検証した結果をご紹介します。AUROC 0.998、欠陥検出率99.6%という数字が何を意味するのか、そして「どこが異常か」をピクセル単位で示せる強みを、実際の出力画像とともに分かりやすく解説します。
なぜ「ひび割れ検出」は難しいのか
コンクリート表面のひび割れ検出は、外観検査のなかでも難易度の高いテーマです。理由は大きく3つあります。
- 欠陥の形が一定でない ― ひび割れは太さ・長さ・分岐・走る向きがすべて異なり、「これが正解」というテンプレートを作りにくい。
- 背景が複雑 ― コンクリートはもともと表面に骨材のムラ、色むら、汚れ、影があり、本物のひび割れと紛らわしい。
- 欠陥サンプルが集まりにくい ― 現場では「正常な面」は無数に撮れても、あらゆるパターンの欠陥画像を網羅的に集めるのは困難。
従来の「欠陥の見本を大量に学習させる」アプローチでは、学習時に見たことのない形のひび割れを取りこぼすリスクが残ります。ここに、異常検知(Anomaly Detection)という考え方が効いてきます。
E3 ENGINE®のアプローチ ― 「正常」を学び、そこからの逸脱を捉える
E3 ENGINE®が採用するのは、欠陥の見本ではなく 「正常な状態」を学習する 異常検知の方式です。正常なコンクリート表面が持つ模様・質感の「あるべき分布」をモデルが記憶し、そこから外れた領域を異常としてスコア化します。
このアプローチの利点は明快です。
- 未知の欠陥にも強い ― 学習時に見ていない形・種類のひび割れでも、「正常ではない」という一点で検出できる。
- 正常データ中心で立ち上げられる ― 集めやすい正常サンプルを軸に学習でき、欠陥画像の収集負担を抑えられる。
- 判定が説明可能 ― 画像のどの画素がどれだけ「異常」かをスコアマップとして出力するため、ブラックボックスにならない。
検証結果 ― 24,000枚で測った実力
今回の検証では、コンクリート表面画像 24,000枚(正常4,000枚/欠陥20,000枚) をテストデータとして、E3 ENGINE®の判定性能を評価しました。
異常スコアが正常と欠陥をくっきり分ける
E3 ENGINE®は1枚ごとに「異常スコア」を出力します。下のヒストグラムは、正常画像(good)と欠陥画像(NG)のスコア分布です。正常はおよそ0.24付近、欠陥は0.45付近に山ができ、最適しきい値0.34を挟んで 2つの集団がはっきり分離 していることが分かります。スコアの重なりが小さいほど、安定した自動判定が可能になります。
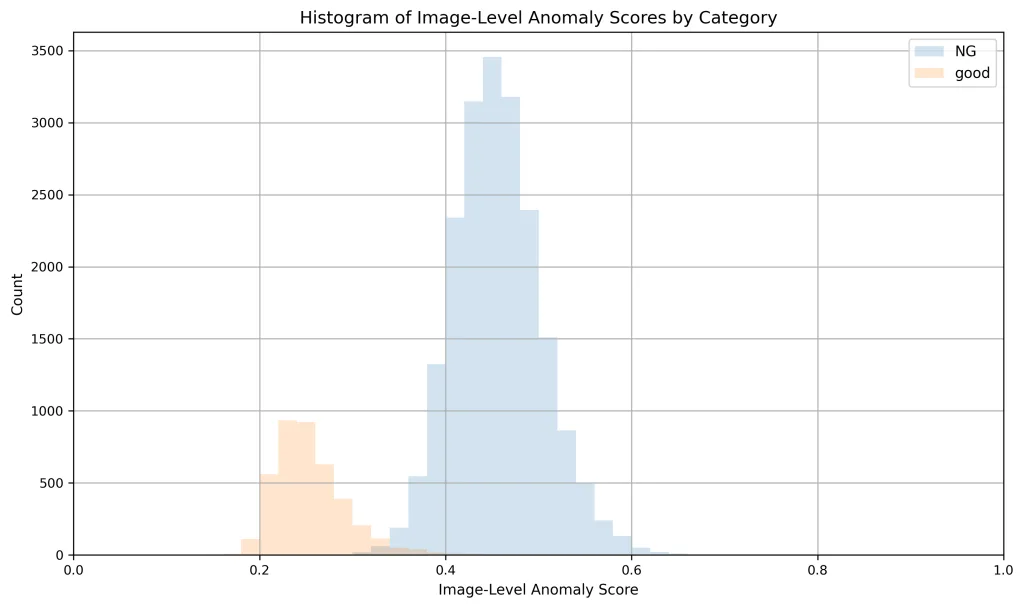
正常画像と欠陥画像の異常スコア分布ヒストグラム。正常は0.24付近、欠陥は0.45付近に分かれて分布正常画像と欠陥画像の異常スコア分布ヒストグラム。正常は0.24付近、欠陥は0.45付近に分かれて分布
AUROC 0.998 ― ほぼ完全な識別性能
判定性能を総合的に示す指標も、極めて高い水準に達しました。
| 指標 | 値 | 意味 |
|---|---|---|
| AUROC | 0.998 | 正常/欠陥の識別力。1.0が完璧で、0.998はほぼ理想的 |
| AP(平均適合率) | 0.999 | 適合率と再現率の総合バランス |
| F1スコア | 0.995 | 見逃しと過検出のバランス(最適しきい値0.338時) |
ROC曲線は左上の角にほぼ張り付き、AUROC 0.998 を記録しました。これは「欠陥をしっかり拾いながら、正常を欠陥と誤判定することがほとんどない」状態を意味します。
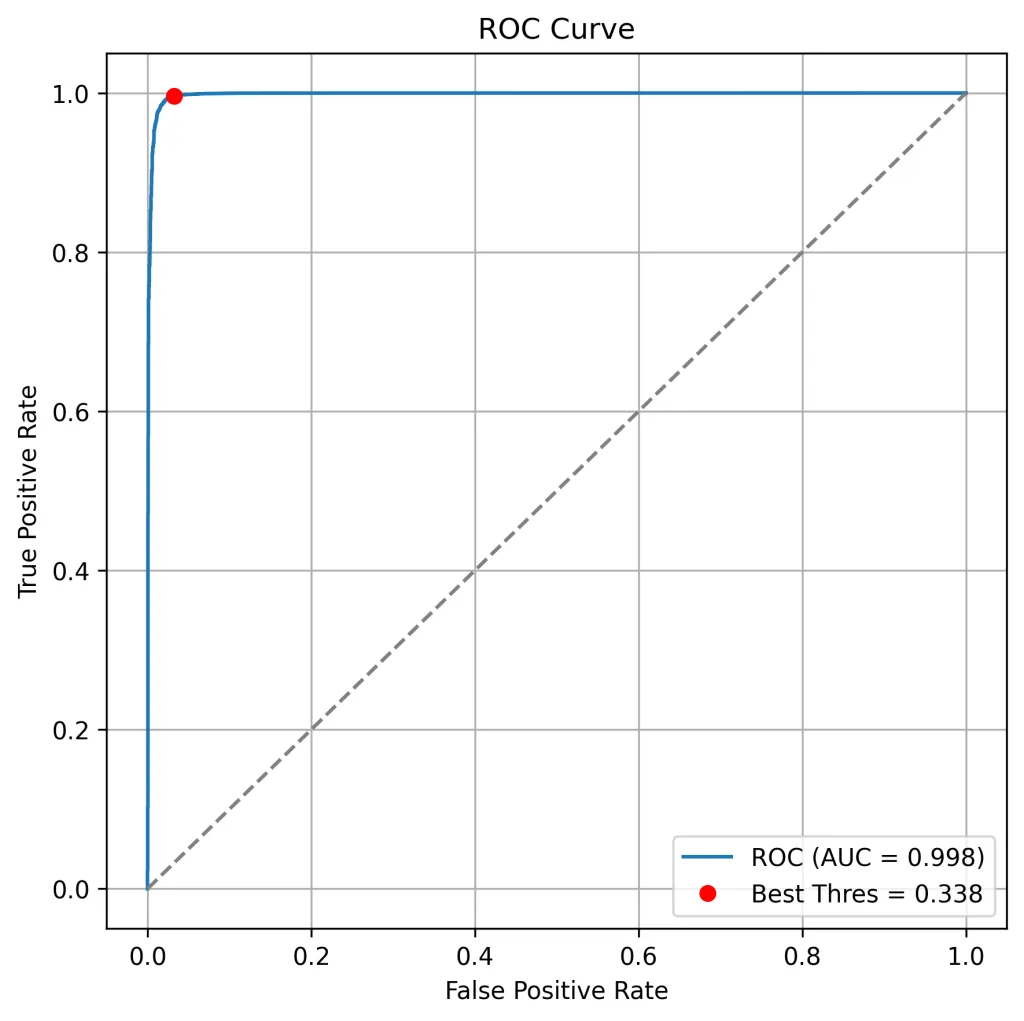
ROC曲線。左上に張り付きAUROC 0.998を示す
欠陥検出率99.6% ― 見逃しは0.37%
実運用で最も気になるのは「結局、どれだけ見逃すのか」です。最適しきい値での混同行列は次の通りでした。
| 欠陥と判定 | 正常と判定 | |
|---|---|---|
| 実際に欠陥(20,000枚) | 19,927(正検出) | 73(見逃し) |
| 実際に正常(4,000枚) | 131(過検出) | 3,869(正判定) |
- 欠陥検出率(再現率)99.6% ― 欠陥20,000枚のうち19,927枚を正しく検出。
- 見逃し0.37% ― 見逃しはわずか73枚(約274枚に1枚)。
- 適合率99.3% ― 「欠陥」と判定したもののうち99.3%が本物。
安全に直結するインフラ点検では「見逃しの少なさ」が決定的に重要です。E3 ENGINE®は、その見逃しを1%未満に抑え込んでいます。
「どこが異常か」まで示す ― 説明可能なAI
E3 ENGINE®の真価は、合否の判定だけにとどまりません。異常がある場所をピクセル単位で可視化 します。下は、欠陥画像に対する処理の流れです。
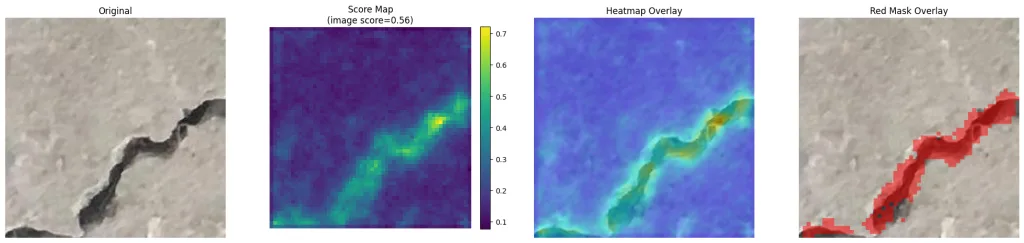
欠陥画像の推論プロセス。左から元画像、スコアマップ、ヒートマップ重畳、赤マスク重畳。ひび割れの経路に沿って異常が検出されている欠陥画像の推論プロセス。左から元画像、スコアマップ、ヒートマップ重畳、赤マスク重畳。ひび割れの経路に沿って異常が検出されている
左から、①元画像 → ②画素ごとの異常スコアマップ → ③元画像へのヒートマップ重畳 → ④赤マスクによる欠陥領域の塗り分け、と処理が進みます。注目すべきは、赤マスクがひび割れの曲がりくねった経路を忠実になぞっている 点です。単に「この画像は欠陥」と言うだけでなく、「この線が異常です」と現場に示せるため、検査員の確認や記録、補修箇所の特定に直結します。
一方、正常な画像ではスコアがしきい値を下回り、赤マスクは現れません。E3 ENGINE®は「異常がある所だけを的確に指し示し、何もない所は静かに通す」という、現場で本当に求められる振る舞いを実現しています。
まとめ
コンクリート表面のひび割れという難易度の高い対象に対し、E3 ENGINE®は実データ24,000枚で次の性能を示しました。
- AUROC 0.998 / AP 0.999 / F1 0.995 ― ほぼ理想的な識別性能
- 欠陥検出率99.6%、見逃し0.37% ― 安全に直結する高い検出力
- ピクセル単位の異常可視化 ― 「どこが異常か」を示す説明可能なAI
- 正常学習ベースの異常検知 ― 未知の欠陥にも対応し、立ち上げ負担を抑える
これらは、製造業の表面検査からインフラ・構造物点検まで、「人の目に頼らない均一な全数検査」を実現するための確かな基盤です。E3 ENGINE®は、見逃さず・過検出せず・理由を示すAIとして、品質保証と省人化の両立を支えます。
E3 ENGINE® の異常検知技術や、自社の検査対象での検証(PoC)にご関心のある方へ。 検査対象の画像をお持ちいただければ、貴社の用途に合わせた検証をご提案します。技術相談・導入のご検討・取材のお問い合わせは、株式会社TOMOMI RESEARCH公式サイト(https://www.tomomi-research.com/)のお問い合わせフォーム、またはメール(info@tomomi-research.com/Tel: 0466-54-9003)にて承っております。